新浪微博
新浪微博
 QQ空间
QQ空间
 微信
微信
 QQ好友
QQ好友


2025年12月22日至23日,“十四五”国家重点研发计划项目“微小型智能化生命搜救机器人关键技术研究及装备研制”示范应用现场会在中国消防救援学院顺利召开。项目负责人、课题负责人和研究骨干等20余人参加了现场会。此次现场会主要针对机器人的爬坡能力、图像传输、语音通话、目标识别、生命感知、通信能力等关键性能指标进行了实景测试与系统评估。
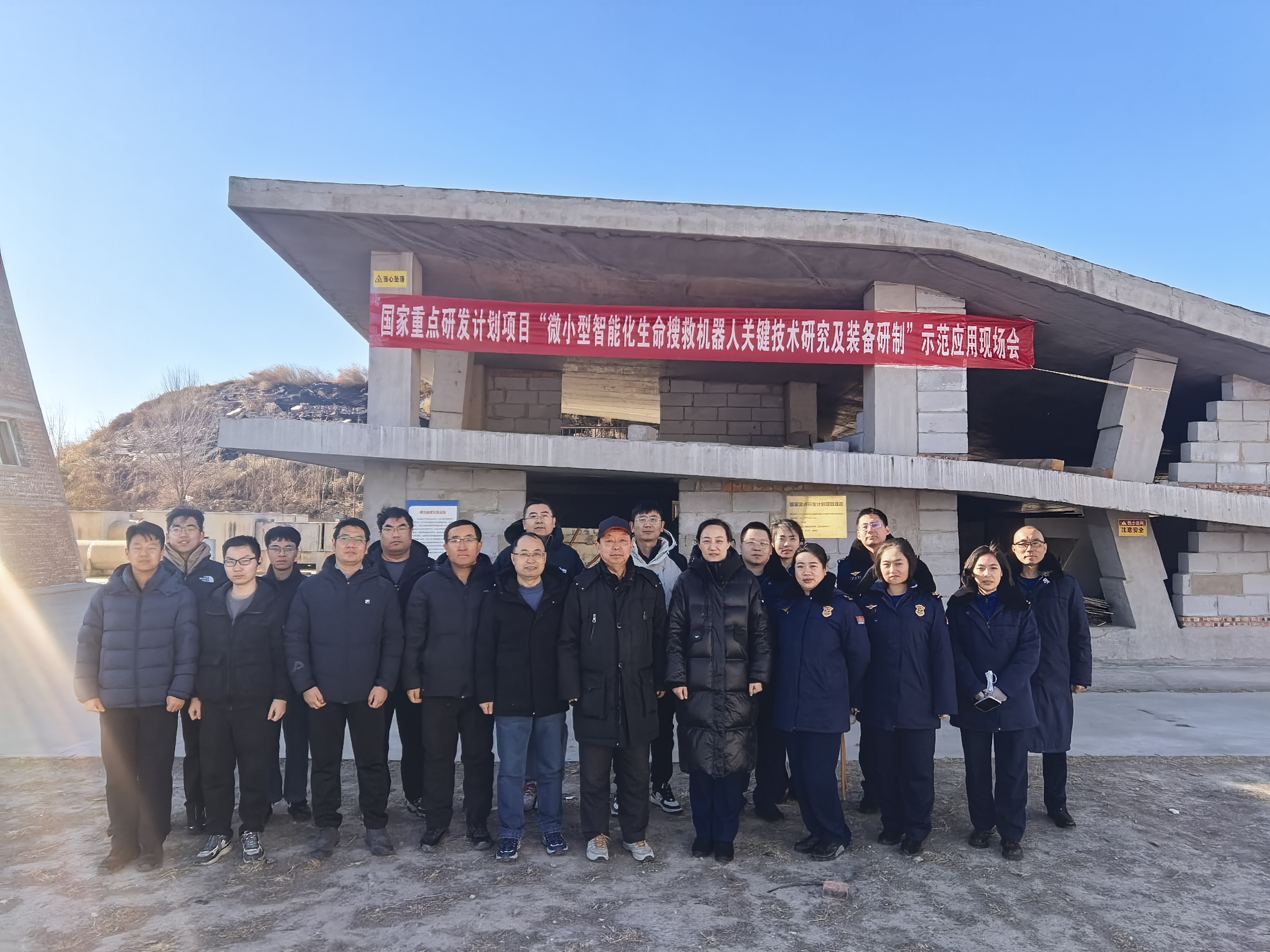
该项目由中国科学院沈阳自动化研究所牵头,中国消防救援学院作为课题五承担单位,负责机器人作业技术研究与示范应用。课题五团队成员在实地调研消防救援队伍和典型案例综合分析的基础上,结合实战需求,并充分吸收专家意见,设计了复杂通道、垂直深井和受限空间等三种典型救援场景对机器人关键指标进行测试与验证。

测试开始前,中国消防救援学院吴传嵩副教授向测试团队详细讲解了垂直深井、受限空间、坍塌废墟等各类灾害场景的救援流程、技术难点与安全事项,并与测试团队讨论了项目研究的机器人在实战应用中的功能定位与适用场景。
测试过程中,在模拟坍塌建筑的复杂通道场景中,机器人借助辅具在具有二次坍塌风险的建筑物内部穿行,并通过红外热成像、激光雷达与视觉传感融合技术精准识别被困人员位置,实时回传清晰图像;在垂直深井模拟环境中,机器人利用项目团队自主研发的通信模块终端,在信号衰减严重地段投放自适应中继节点,确保通信链路稳定,成功实现深井底部音视频信息与激光点云数据的连续回传;在受限空间模拟场景测试中,机器人凭借多关节柔性结构、主动越障机构与多自由度运动底盘,顺利通过狭窄通道、瓦砾缝隙,完成狭小通道内上下攀爬与复杂障碍通行任务。

测试结束后,与会人员一致认为,项目研发的机器人在复杂环境下的机动性、感知精度和通信稳定性达到项目预期指标,具备一定的实战应用价值。此次测试也暴露出机器人在废墟爬行、自适应组网、信号传输等方面存在一定短板,项目团队将制定专项方案,进一步优化机器人各项指标,提升高机器人在复杂路面、强干扰、高动态环境下的作业能力,并加快技术成果向救援装备转化,推动形成标准化、系列化产品。